
install Apache on Ubuntu Google Cloud
sudo apt update
sudo apt upgrade
sudo apt install apache2
Domoticz install on ubuntu problem
error while loading shared libraries: libssl.so.1.1: cannot open shared object file: No such file or directory
apt-get install –reinstall openssl
error while loading shared libraries: libcrypto.so.1.1: cannot open shared object file: No such file or directory
apt-get install libxss1
/lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27′ not found
DIY Soil Moisture Sensor
SparkFun Soil Moisture Sensor
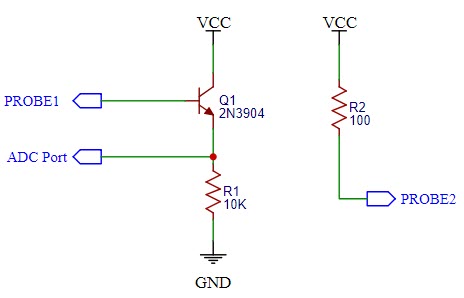
2N3904 Transistor same as:BC547,BC598,BC599,2N2222,BC107,2N2907,BC327,BC327,C9013,C1815,C4012,C4012,BC377 (printed C33725),C338
ref:https://www.sparkfun.com/products/13322?_ga=2.88403867.1446786914.1610372384-655404040.1609953707
faludi.com
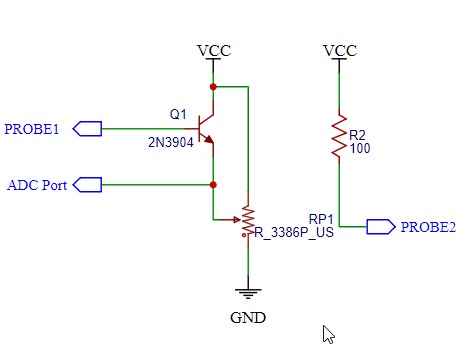
ref:https://www.faludi.com/2006/11/02/moisture-sensor-circuit/
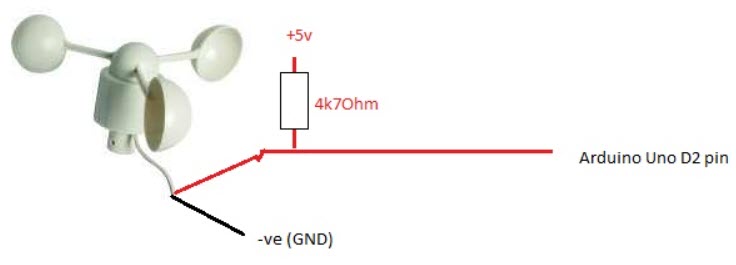
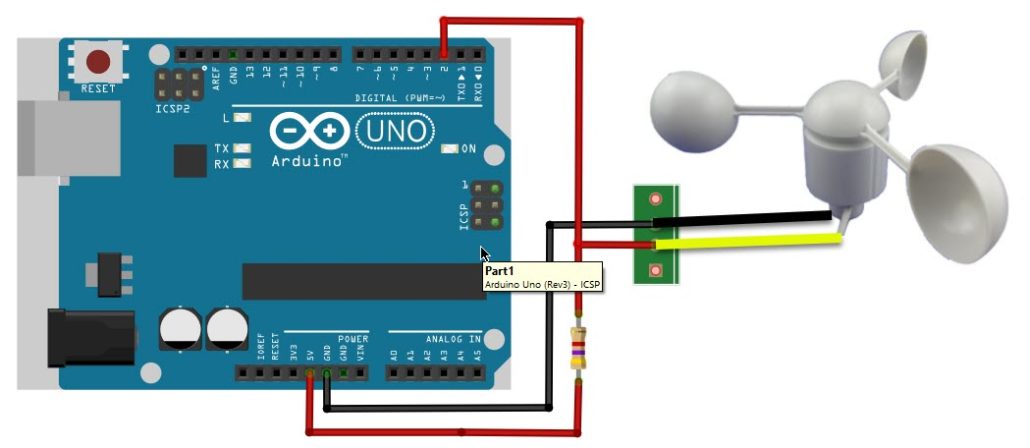
Arduino Uno Wind Speed Way 2

#include <math.h>
#include <millisDelay.h>
#define windSensorPin 2
millisDelay timerDelay;
int windCounter = 0;
float windSpeedM = 0;
float windSpeedK = 0;
int windPulse = 0;
int pulses = 0;
int startTest = 1;
int windTest1 = 1;
int windTest2 = 0;
int windTimer = 1;
int result = 1;
int timerStart = 1;
void setup() {
// Set console baud rate
Serial.begin(19200);
pinMode(windSensorPin, OUTPUT);
// pinMode(RainPin, OUTPUT);
// pinMode(windDirectionPin, INPUT);
delay(10);
}
void loop() {
if (digitalRead(windSensorPin) < 1 && startTest == 1 )
{
// windDirValue = analogRead(windDirectionPin);
// windDir = map(windDirValue, 1, 1024, 1, 5000);
windTest1 = 1;
windTest2 = 1;
windTimer = 1;
result = 1;
startTest = 0;
}
WindSpeed();
if (digitalRead(windSensorPin) < 1 && timerStart == 1)
{
timerDelay.start(3000);
result = 1;
timerStart = 0;
}
if (timerDelay.justFinished() && result == 1)
{
windSpeedM = 1.25 * (pulses/3);
windSpeedK = windSpeedM * 1.60934;
Serial.print(“WindSpeed: “);
Serial.print(windSpeedM);
Serial.print(” mph tt”);
Serial.print(windSpeedK);
Serial.println(” kphtt”);
// Blynk.virtualWrite(V2,windSpeed);
pulses = 0;
windSpeedM = 0;
startTest = 1;
result = 0;
timerStart = 1;
}
}
void WindSpeed()
{
if (digitalRead(windSensorPin) < 1)
{
windCounter++;
}
if (windCounter > 0 && digitalRead(windSensorPin) == 1 && windTest1 == 1)
{
windPulse += 1;
windCounter = 0;
}
if (windPulse == 3 && windTest2 == 1)
{
pulses += 2;
//Serial.println(pulses);
windPulse = 0;
}
}
ref:https://community.createlabz.com/knowledgebase/mini-weather-station-rain-gauge-wind-speed-wind-direction-using-blynk-and-sim800c/
Arduino Uno Wind Speed Way 1
#include “TimerOne.h” // Timer Interrupt set to 2 second for read sensors
#include <math.h>
#include <Time.h>
// speed ok near speed-3.ino
#define WindSensorPin (2) // The pin location of the anemometer sensor
char wind[10]; //empty array where to put the numbers going to the master
int LastValue;
//int wind = 0;
volatile bool IsSampleRequired; // this is set true every 2.5s. Get wind speed
volatile unsigned int TimerCount; // used to determine 2.5sec timer count
volatile unsigned long Rotations; // cup rotation counter used in interrupt routine
volatile unsigned long ContactBounceTime; // Timer to avoid contact bounce in interrupt routine
float WindSpeed; // speed miles per hour
byte x = 0;
void setup() {
Serial.begin(19200);
pinMode(WindSensorPin, INPUT);
attachInterrupt(digitalPinToInterrupt(WindSensorPin), isr_rotation, FALLING);
Serial.println(“Davis Anemometer Test”);
Serial.println(“Speed (MPH)tKnotstDirectiontStrength”);
Timer1.initialize(500000);
Timer1.attachInterrupt(isr_timer);
}
void loop() {
if(IsSampleRequired)
{
// convert to mp/h using the formula V=P(2.25/T)
// V = P(2.25/2.5) = P * 0.9
WindSpeed = Rotations * 0.48;
Rotations = 0; // Reset count for next sample
// wind = WindSpeed;
IsSampleRequired = false;
Serial.print(WindSpeed); Serial.println(“tt”);
// Serial.print(getKnots(WindSpeed)); Serial.print(“t”);
// Serial.print(CalDirection);
// getHeading(CalDirection); Serial.print(“tt”);
// getWindStrength(WindSpeed);
}
}
void isr_timer() {
TimerCount++;
if(TimerCount == 5)
{
IsSampleRequired = true;
TimerCount = 0;
}
}
void isr_rotation () {
if ((millis() – ContactBounceTime) > 15 ) { // debounce the switch contact.
Rotations++;
ContactBounceTime = millis();
}
ref:http://cmfc-weatherstation.blogspot.com/2016/
QuasarARM การกลับมาแก้ตัวอีกครั้ง #8
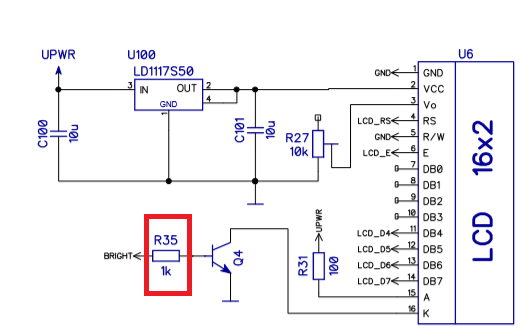
วันนี้ได้ R35 ขนาด 100 โอห์ม 0805 มาต่อแล้ว ทดลองจ่ายไฟ โลกก็สว่างขึ้นทันที

เท่านี้ก็สุขใจ ระหว่างรอ อุปกรณ์ที่เหลือทยอยมา หาเวลาประกอบอีก board ดู
QuasarARM การกลับมาแก้ตัวอีกครั้ง #7
วันนี้ได้ลองบัดกรี switch powerแและ menu ไล้ตะกั่ว ที่จุด switch UP DOWN LEFT RIGHT OK ครบ พอต่อไฟ กด POWER ก็ทำงาน กด MENU ก็แสดงได้ ยูเรก้าอีกครั้ง เอาสายไฟมาจิ้มครงปุ่มก็เลื่อนได้ โอเคเลย เป้าหมายคือการไปปรับ BACKLIGHT ของ LCD ในเมนู
หาข้อมูลของตารางเมนู จนเจอหวิธีปรับความสว่่าง Backlight ลองตั้ง Level จน 99 ก็ยังไม่สว่าง มานั่งเดาว่าขา 12 ของ STM32 บัดกรีไม่ดีหรือเปล่าหว่า
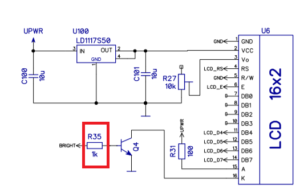 ไล่ไปพบว่า R35 100 โอห์ม 1206 ไม่ได้ใส่ไว้ กำลังสั่งมา ว่างๆจะเอา 100 โอห์ม 0805 ใส่ไปแทนก่อน
ไล่ไปพบว่า R35 100 โอห์ม 1206 ไม่ได้ใส่ไว้ กำลังสั่งมา ว่างๆจะเอา 100 โอห์ม 0805 ใส่ไปแทนก่อน
 ไล่ไปพบว่า R35 100 โอห์ม 1206 ไม่ได้ใส่ไว้ กำลังสั่งมา ว่างๆจะเอา 100 โอห์ม 0805 ใส่ไปแทนก่อน
ไล่ไปพบว่า R35 100 โอห์ม 1206 ไม่ได้ใส่ไว้ กำลังสั่งมา ว่างๆจะเอา 100 โอห์ม 0805 ใส่ไปแทนก่อน
QuasarARM การกลับมาแก้ตัวอีกครั้ง #6
คราวก่อนเราใช้ไฟ 3.3V จาก USB TTL UART คราวนี้จะบัดกรีอุปกรณ์เพิ่มเติม โดยตั้งใจจะจ่ายไฟ ด้วยตนเอง และเชื่อม LCD 16×2 สีฟ้า เพื่อดูการทำงาน และเป็นกำลังใจให้ตัวเอง บนหนทางอีกยาวไกล
 แต่ก็สงสัยว่าทำไม LCD ไม่สว่างเลย แม่บ้านให้ลูกมาตามไปนอนแล้ววันนี้คงพอแค่นี้ก่อน
มีโอกาสพรุ่งนี้จะหาวิธีทำให้ LCD สว่างและทดสอบการทำงานของปุ่มต่างๆ รวมทั้งสั่งซื้ออุปกรณ์ที่เหลือให้ครบ นี่ยังไม่รวม การพัน Searchcoil คอยที่ยังต้องใช้เวลาศึกษาอีกนานสักระยะหนึ่ง
แต่ก็สงสัยว่าทำไม LCD ไม่สว่างเลย แม่บ้านให้ลูกมาตามไปนอนแล้ววันนี้คงพอแค่นี้ก่อน
มีโอกาสพรุ่งนี้จะหาวิธีทำให้ LCD สว่างและทดสอบการทำงานของปุ่มต่างๆ รวมทั้งสั่งซื้ออุปกรณ์ที่เหลือให้ครบ นี่ยังไม่รวม การพัน Searchcoil คอยที่ยังต้องใช้เวลาศึกษาอีกนานสักระยะหนึ่ง
- บัดกรี AMS1117-3.3 ตามแบบต้องใช้ LD1117S33 แต่อันนี้ถอดจากอันเดิมได้ เอามาก่อน ไม่ลืมบัดกรีสาย ต่อ ไปยัง LP2985-33 แค่นี้ CPU ก็ทำงานแล้ว
- จุดหนึ่งใช้ AMS1117 5 โวลท์ ตามแบบต้องใช้ LD1117S50 ของที่เพิ่งซื้อมายังงี้ แทนกันได้ จ่ายไฟให้กับ LCD มี VR10k อีก 1 ตัว
- บัดกรี Resistor Capacitor และ Transistor BC846 องค์ประกอบให้ LCD ทำงาน
- บัดกรี FM IC KT0803L ส่วนนี้เกือบครบขาด L 1uH กับ Transistor 2SC3356
- บัดกรี MC34119
- บัดกรี 24C08
 แต่ก็สงสัยว่าทำไม LCD ไม่สว่างเลย แม่บ้านให้ลูกมาตามไปนอนแล้ววันนี้คงพอแค่นี้ก่อน
มีโอกาสพรุ่งนี้จะหาวิธีทำให้ LCD สว่างและทดสอบการทำงานของปุ่มต่างๆ รวมทั้งสั่งซื้ออุปกรณ์ที่เหลือให้ครบ นี่ยังไม่รวม การพัน Searchcoil คอยที่ยังต้องใช้เวลาศึกษาอีกนานสักระยะหนึ่ง
แต่ก็สงสัยว่าทำไม LCD ไม่สว่างเลย แม่บ้านให้ลูกมาตามไปนอนแล้ววันนี้คงพอแค่นี้ก่อน
มีโอกาสพรุ่งนี้จะหาวิธีทำให้ LCD สว่างและทดสอบการทำงานของปุ่มต่างๆ รวมทั้งสั่งซื้ออุปกรณ์ที่เหลือให้ครบ นี่ยังไม่รวม การพัน Searchcoil คอยที่ยังต้องใช้เวลาศึกษาอีกนานสักระยะหนึ่ง